歡迎訪問上海會通自動化科技發展股份有限公司的官方網站-運動控制產品及整體解決方案供應商!
 +86 13601713945
+86 13601713945

伺服電機-松下伺服負載變動抑制功能
2020-08-11 15:16
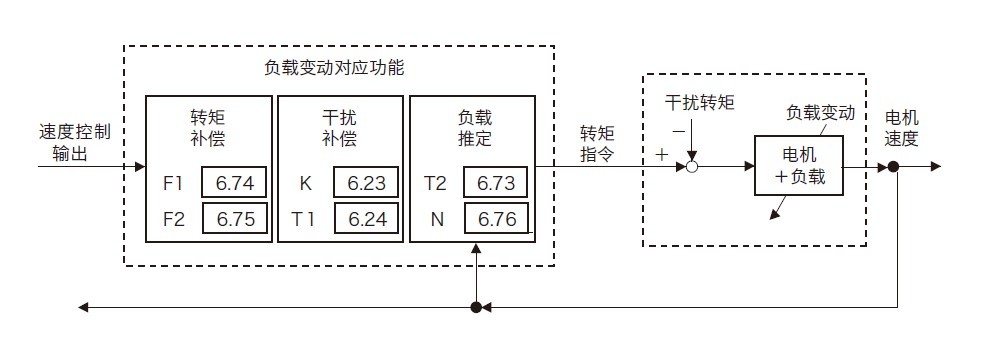
通過外部干擾轉矩以及負載變動抑制松下伺服電機速度變動,提升穩定性的功能。實時自動調整在對應困難的負載變動生成等情況下有效。
通過外部干擾轉矩以及負載變動抑制松下伺服電機速度變動,提升穩定性的功能。實時自動調整在對應困難的負載變動生成等情況下有效。
使用方法:
關于負載變動抑制功能的調整方法,有以下2種:
※ 無負載慣量變動的情況(外部干擾抑制設定)
- 事先進行通常的增益調整。
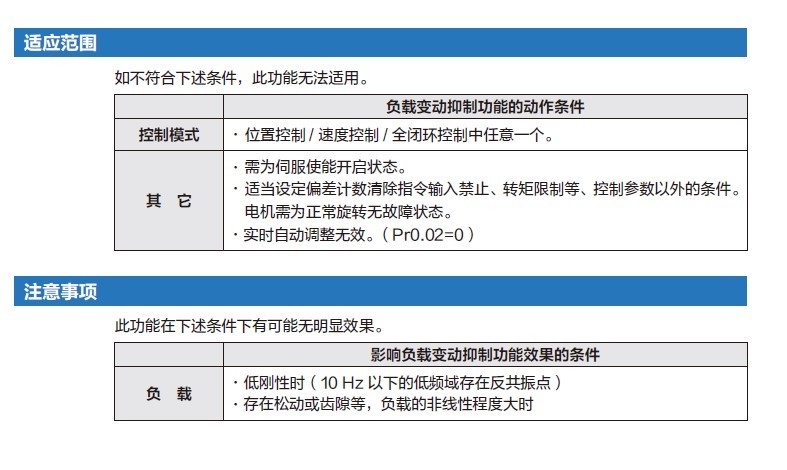
負載變動抑制功能無效狀態下(pr6.10 bit1=0),使用實時自動增益調整(pr0.02=1)或者通過手動設定,盡可能提高剛性(pr0.03)。
- pr6.10(bit1 =1,使負載變動抑制功能有效,確認伺服電機動作后外部干擾抑制效果)
切換負載變動抑制功能的有效.無效時,暫時關閉伺服使能。
此變更下如果電機發振,或者有異音時,請返回到步驟①將松下伺服剛性降低1~2段后,重復進行以后的步驟。
- 進行進一步調整時,請通過pr6.10 bit14=0使得負載變動抑制功能的自動調整無效。
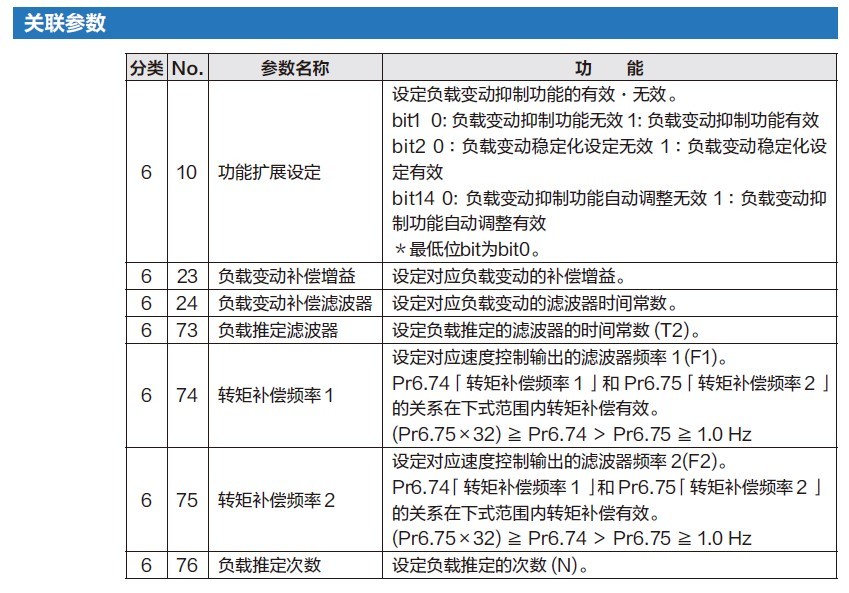
- 盡量減小pr6.24(負載變動補償濾波器)
在異音或者轉矩指令變動不顯著的范圍內通過變小濾波器的設定,提升外部干擾抑制性能,減小伺服電機速度的變動或者編碼器位置偏差。
高頻率(1khz以上)異音發生時,請增大PR6.76(負載推定次數)
停止后等低頻(10Hz以下)振動發生時,請試著降低PR6.23(負載變動補償增益)
PR6.73(負載推定濾波器),沒有通常變更的必要,請在0.00~0.20ms范圍內進行微調整后設定在最適點。
- 有負載慣量變動的情況(負載變動穩定化設定)
① 2自由度位置控制(同步類型)(pr0.01=0、pr6.47 bit0=1,bit3=1),接通控制電源。
②設定指令響應濾波器(pr2.22)為10ms/。
③實時自動增益調整為負載變動對應模式(Pr0.02=6),在此狀態下通過可生成盡可能打的負載變動模型進行電機動作。
④剛性(pr0.03)盡可能設高。
⑤指令響應濾波器是邊看松下伺服電機的響應邊設定較小的合適的值。
地址:上海市四川北路859號中信廣場3503、604室
電話:021-63578505
傳真:021-63570802、63577507
郵箱:sales@shhuitong.net
抖音號:上海會通松下伺服

上海會通自動化科技發展股份有限公司




上海市四川北路859號中信廣場3503-3504
