歡迎訪問上海會通自動化科技發展股份有限公司的官方網站-運動控制產品及整體解決方案供應商!
 +86 13601713945
+86 13601713945

松下伺服上位控制如何實現?
2019-11-04 10:56
伺服驅動器接受控制器的控制指令,然后通過動力線纜驅動伺服電機,而伺服電機的實時位置,通過編碼器線纜反饋至伺服驅動器,形成閉環控制。很顯然,這種模式下,伺服驅動器僅僅上充當了放大器的角色,這是絕大部分伺服的工作模式,比如松下、安川,富士,三菱,臺達等等。
松下伺服上位控制如何實現?
伺服驅動器接受控制器的控制指令,然后通過動力線纜驅動伺服電機,而伺服電機的實時位置,通過編碼器線纜反饋至伺服驅動器,形成閉環控制。很顯然,這種模式下,伺服驅動器僅僅上充當了放大器的角色,這是絕大部分伺服的工作模式,比如松下、安川,富士,三菱,臺達等等。
還有部分伺服驅動器內置控制器功能,可以在驅動器內部進行編程,實現運動控制,能實現電子凸輪,相位同步等等運動控制功能等
脈 沖 控 制
上位機通過發送脈沖到松下伺服驅動器,來實現控制。在這種方式下,用脈沖頻率來控制速度,用脈沖個數來控制位置。同樣,伺服驅動器也會發送脈沖數,來告訴上位機,伺服電機的位置和速度。
比如,我們約定伺服電機10000個脈沖旋轉一圈,那么,當上位機發送10000個脈沖,伺服電機旋轉一圈,實現位置控制。如果上位機在一分鐘內發完這10000個脈沖,那么伺服電機的速度就是1r/min,如果實在一秒鐘內發完,那么伺服電機的速度就是1r/s,也就是60r/min。
低端PLC,數控系統,以及各種單片機系統一般都是采用這種模式,簡單易行,成本低廉。很顯然,當伺服軸數增加,這種控制方式的缺點就會顯現出來,上位機硬件成本會增加,配線會很復雜,而且現場EMC不好的話,脈沖易丟失。所以,這種模式一般適合用在軸數比較少的場合。
模 擬 量 控 制
上位機通過發送模擬量到松下伺服驅動器,來實現控制。在這種方式下,用模擬量電壓的大小來控制電機速度或者轉矩。同樣,伺服驅動器也可輸出送脈沖數,來告訴上位機,伺服電機的位置和速度。
例如,伺服電機3.02號參數設置成500【(r/min)/V】,也就是6V就對應3000 r/min,電機轉速大小根據上位提供提供模擬量大小來決定。伺服電機3.19號參數設置成100,也就是10V對應100%的轉矩,電機扭矩大小根據上位提供模擬量大小來決定。
通 訊 方 式
通訊方式就是專門為解決脈沖方式的不足而產生的,已經成為一種發展趨勢,他把脈沖數和脈沖頻率通過通訊的方式,發送給伺服驅動器,這種方式不但可以傳遞伺服電機的位置信息,還能傳遞各種狀態信息,比如伺服電機的電流,扭矩以及伺服驅動器的故障代碼等等,很顯然,當軸數多的時候,這種方式的優勢不言而喻。
一、RTEX通訊:
松下伺服RTEX通訊完全滿足了運動控制高速指令傳輸、穩定可靠、抗干擾、高同步性的性能要求。這也正是未來設備對總線的核心訴求:高速、高精、高抗噪性能。
而RTEX通過數據進行指令傳輸,指令可以達到4Gpulse/s,即使以8388608pulse/圈的分辨率運行在6000rpm下都綽綽有余。
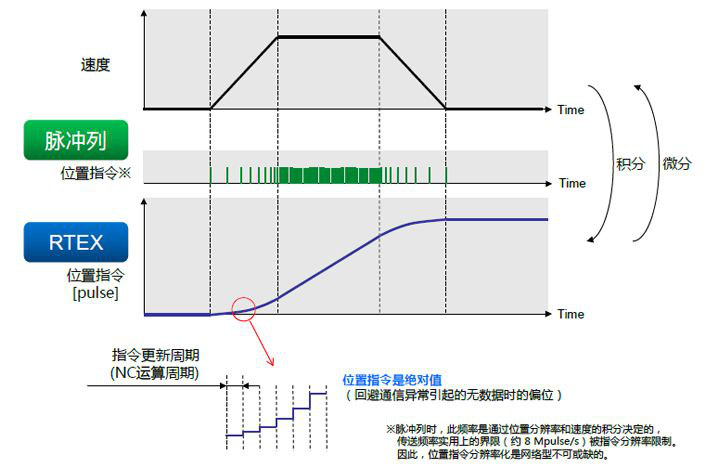
圖1 RTEX與脈沖列指令對比
激光加工機、液晶面板點膠機等方面, 可通過進行高速微小的圓弧插補用途提升精度
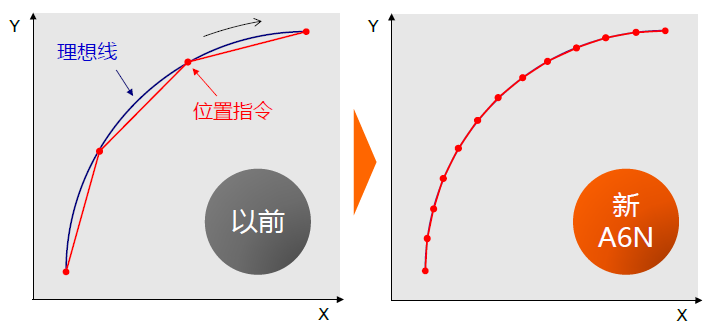
圖2 位置指令與RTEX指令平滑度比較
上圖可以很容易理解脈沖指令方式和總線方式指令的區別:
總線可以帶來設備性能的巨大提升,速度精度要求高的應用才會選擇總線方式,價格也會偏高,且作為高應用,價格下不來。但是基于當前設備的升級要求,除了半導體、液晶設備、電子元器件貼裝設備這類傳統高速高精的代表,越來越多的設備,比如機器人、數控機床、紡織經編、鋰電光伏、木工、石材等設備開始加入總線控制陣列。高速、高精正是RTEX可以帶來的重要價值。
“抗噪性能”是對工業總線的基本的要求
半導體、液晶面板等需要24小時不間斷生產的場景,即便是偶發的停機也是不允許的。通信干擾易引發設備停機,而RTEX在抗噪性能上有著良好表現,其抗噪技術在各類運控總線中較好。
法寶一:更短的數據幀
整個數據幀只留下前部的前導幀頭和RTEX幀頭,較小的幀頭更易于實現實時控制,同時有獨特的校驗及數據復原算法,相對于冗長的多層以太網數據幀結構,更不易受到干擾。
通過簡化通信數據包、實現高速實時控制
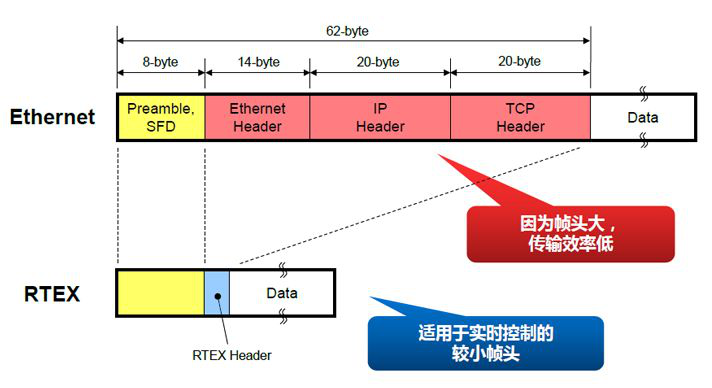
圖3 通訊格式
法寶二:冗余數據幀
可以設定指令更新周期和通信周期1:1或者1:2。當設定1:2時,每次指令更行周期發送2次相同的數據幀,從而實現數據幀冗余,即使某一個數據幀發生數據丟失對整體通信也毫無影響。
在指令更新周期不變的情況下縮短通信周期, 相應傳達時間將縮短

圖4 通訊周期
法寶三:已申請專利的數據幀修復功能
數據修復可以保障數據由于噪聲干擾受到一定程度破壞的情況下,也可以在該通信周期內將數據復原,這種狀況下即使后續數據無法即刻跟上,數據幀也能在同一通信周期內復原,完全不影響整體通信。
每節點處進行錯誤修正實現高抗噪性
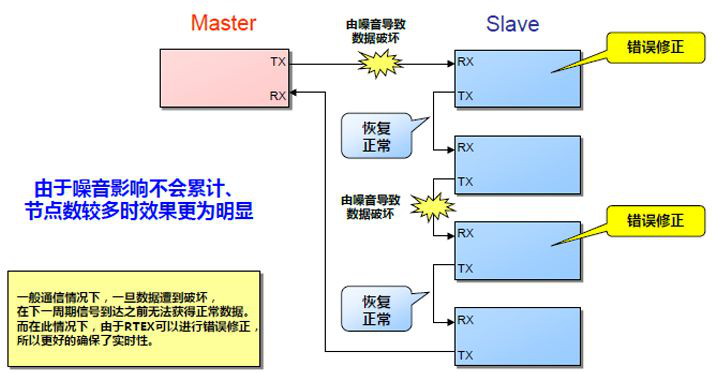
圖5 數據幀修復
法寶四:環形拓撲結構
保障數據通信的單向環形傳輸,從而不會因雙向傳輸而占用信道,避免數據交叉產生的影響。
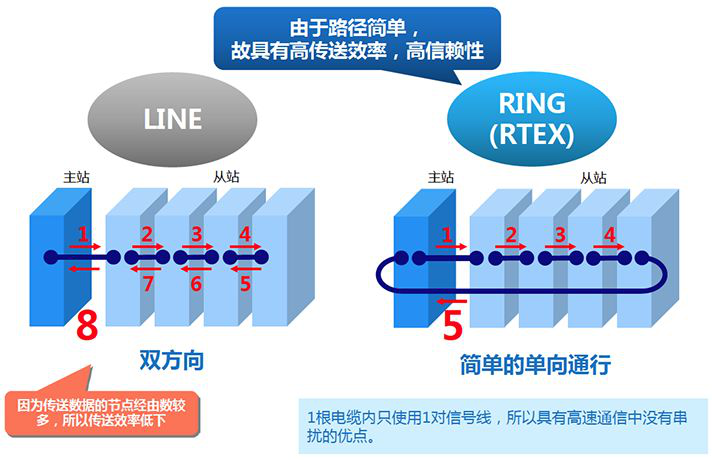
圖6 拓撲結構
有了上述四項法寶,通信網絡的抗噪性能得到充分保障,進而保證設備的穩定性,這也是RTEX總線在對抗干擾問題上,通過多層保障機制,實現“皮實”通信的基礎。
二、Ethercat通訊:
· 通訊周期 125us
· 不需要專用的硬件、可實現基于PC的主站(上位控制器)
· 可進行各種從站和系統升級
· 實現了高精度的同位控制
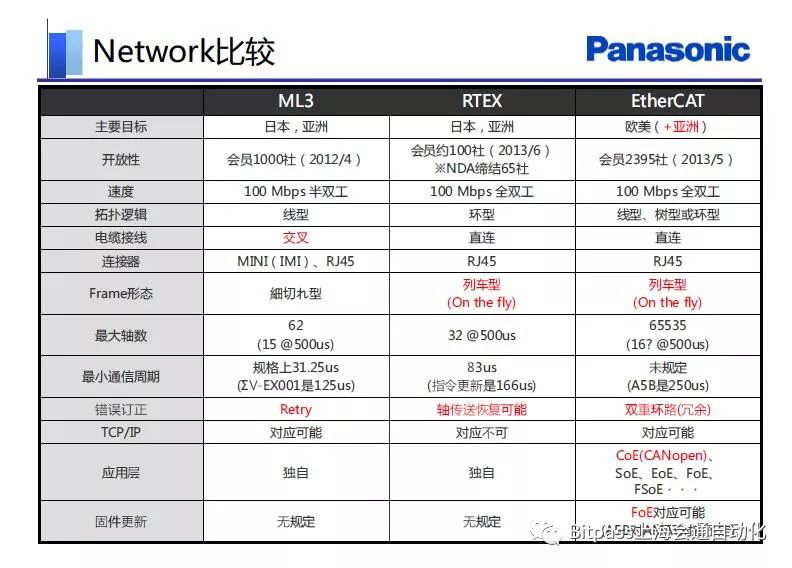
圖7 Network 比較
三、Modbus通訊方式:
基本配置
PLC:FP-X0 L40MR
伺服:A6SG系列

圖8 MODBUS 通訊
系統特點
· 性價比高
· PLC無需專用的脈沖通道
· X0系列I/O點數最大可擴展236點
· 控制軸數多(最大31軸)
· 接線方便,減少配線
· 及時反饋軸狀態
· 伺服參數可讀寫
· 可執行定位(增量式/絕對式)
· 可執行回原點
· 每軸最多256條定位指令
串行通信控制模式
· 對應多種PLC支持的開放網絡“MODBUS-RTU”
· 對應RS232/RS485兩種通信
· 可以定位、收集來自上們的驅動信息(負載率及壽命作息等)、參數的寫入
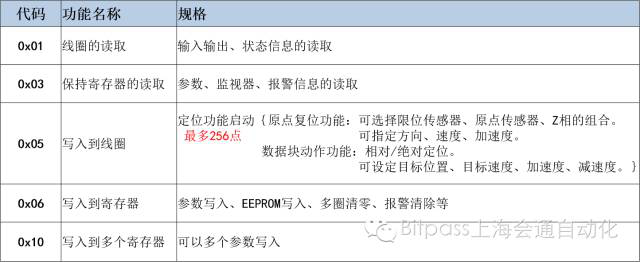
圖9 MODBUS 指令代碼說明
X2通信口引腳定義
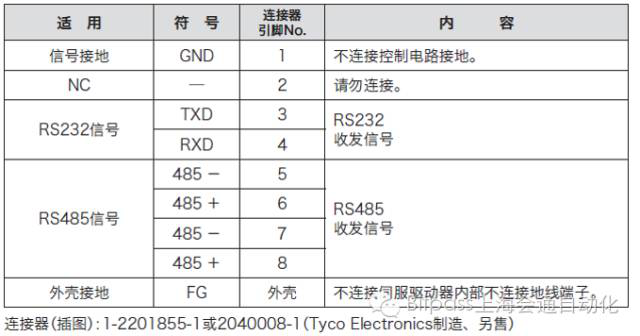
圖10 MODBUS 通訊端口定義
MODBUS RTU可對應通信波特率[ bps]
2400、4800、9600、38400、19200、57600、115200、230400
使用RS232物理層的情況
將Pr5.37[Modbus連接設置]設置為1,可以通過RS232進行1:1的Modbus通信。
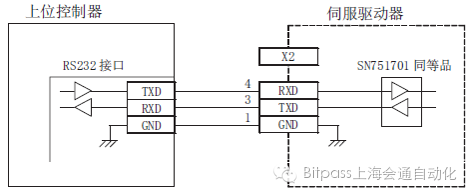
圖11 Modbus RTU 接線
使用RS485物理層的情況
將Pr5.37[Modbus連接設置]設置為2,可以通過RS485進行1:N的
Modbus(N最大31軸)
可作MODBUSRTU的驅動器
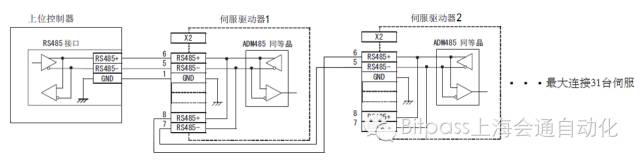

圖12 松下伺服驅動器型號說明
松下PLC用MODBUSRTU控制A6驅動器示例程序1
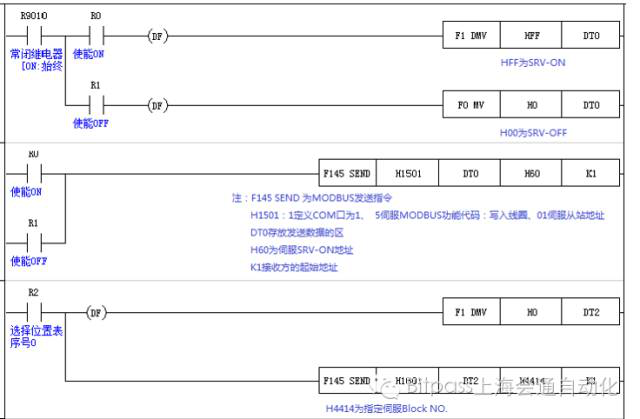
圖13 松下PLC編程案例
要想了解更多相關信息,請聯系我們
地址:上海市四川北路859號中信廣場3503、604室
電話:021-63578505
傳真:021-63570802、63577507
郵箱:sales@shhuitong.net
微信公眾號:Bitpass


上海會通自動化科技發展股份有限公司




上海市四川北路859號中信廣場3503-3504
