歡迎訪問上海會通自動化科技發(fā)展股份有限公司的官方網(wǎng)站-運動控制產(chǎn)品及整體解決方案供應(yīng)商!
 +86 13601713945
+86 13601713945

松下伺服電機回原點方式總結(jié)
2020-04-17 10:24
上海會通是松下公司授權(quán)的代理商,擁有20多年行業(yè)經(jīng)驗,具備系統(tǒng)集成及開發(fā)應(yīng)用能力,松下傳感器服務(wù),完善的售后支持,以及全套解決方案!

使用增量式松下伺服電機的機器設(shè)備,運行在位置控制模式下時,大部分機器在啟動時需要進行一次原點復(fù)位動作,找一次原點作為參考位置,然后才能進行下一步的動作。回原點方法有多種:
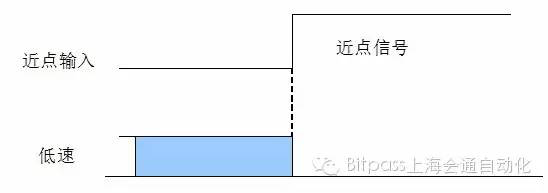
1、只有一個近原點開關(guān)的情況,回原點方法是機器按一恒定速度向原點開關(guān)方向移動(也有分兩段速度的情況),碰到原點開關(guān)信號后,立即停止,以此位置作為原點位置。
這種回原點方法比較簡單,但是受傳感器精度,回原點速度,加速度等方面的問題的影響,回原點精度不高,會有一定的偏差,一般適用在精度要求不高的機械上。
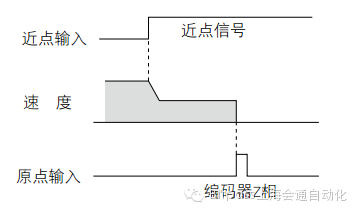
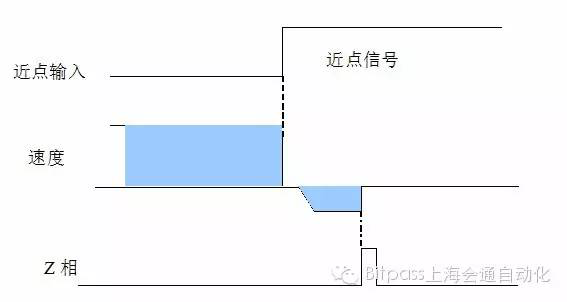
2、近原點開關(guān)+Z相信號的情況,回原點方法是機器按一恒定速度向原點開關(guān)方向移動,碰到原點開關(guān)信號后:①立即減速,以一個很慢的速度繼續(xù)前行,碰到一個Z相信號后停止,并以此位置作為原點位置;②立即停止,然后以一個較低的速度反向運行,碰到一個Z相信號后停止,并以此位置作為原點位置。
這種傳感器+Z相信號的回原點方式精度高,但也存在一個問題,即傳感器的觸發(fā)位置和Z相信號位置不能離的太近,離是太近可能會造成一個Z相信號不能被穩(wěn)定采集到,就會造成電機一圈的偏差。
解決方法是調(diào)整傳感器位置(相差1/5位置為較佳位置)或轉(zhuǎn)動下電機轉(zhuǎn)再鎖緊(傳感器是固定位置不可移動的的情況),可配合PANATERM軟件的原點搜索功能使用。
①
②
3、觸停式找原點方法,在行程較短等不便安裝傳感器時,即可使用這種方法回原點,使用這種方法需要使用 TL-SEL(轉(zhuǎn)矩切換)、TLC(轉(zhuǎn)矩限制中輸出)、CL(偏差計數(shù)器清除等功能)。TL-SEL(轉(zhuǎn)矩切換)功能未默認分配引腳,需重新定義。Pr521(轉(zhuǎn)矩限制選擇)設(shè)置為3,Pr522設(shè)置到百分之100以下。
回原點時,上位機通過TL-SEL切換到轉(zhuǎn)矩限制,慢速移向原點位置,當(dāng)碰到原點位置擋塊時電機停止運行,輸出力矩上升,當(dāng)達到Pr522設(shè)定值時,TLC輸出一信號給上位機,此時上位機停止發(fā)脈沖,輸出CL信號清除偏差計數(shù)器里的剩余脈沖,并以此位置作為原點位置,同時切換TL-SEL到轉(zhuǎn)矩限制。

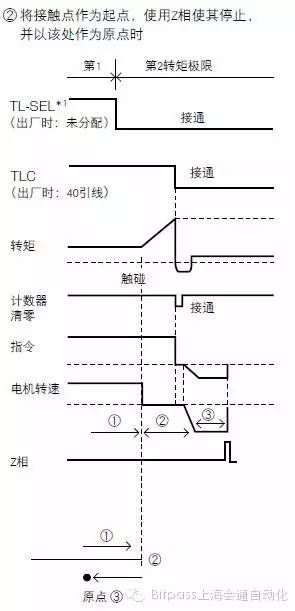
4、觸停+Z相信號找原點方法,這種方法和第3種方法相比,多了一個反向運行找Z相信號的步驟,即在第3種方法的基礎(chǔ)上,再以一個較慢的速度反向運行,找到一個Z相信號后停止作為原點位置,這種方法精度更高,但也會存在方法2相同問題(即觸停位置和Z相信號過近,造成Z相信號不能穩(wěn)定采集產(chǎn)生誤差),需調(diào)整擋塊位置或轉(zhuǎn)動電機軸重新鎖緊解決。
要想了解更多相關(guān)信息,請聯(lián)系我們

地址:上海市四川北路859號中信廣場3503、604室
電話:021-63578505
傳真:021-63570802、63577507
郵箱:sales@shhuitong.net
微信公眾號:Bitpass

上一篇:

上海會通自動化科技發(fā)展股份有限公司




上海市四川北路859號中信廣場3503-3504
